



Европейский манипулятор ERA (European Robotic Arm), установленный снаружи многоцелевого модуля «Наука», пополнил арсенал роботизированных средств на Международной космической станции. Об особенностях манипулятора, его сходствах и различиях с канадским и японским «коллегами» рассказывает в журнале «Русский космос» Игорь Афанасьев.
Управляется через ноутбук
Европейская роботизированная «рука» ERA, изготовленная голландским отделением концерна Airbus Defence and Space и установленная на модуле «Наука», дополнит навесное оборудование российского сегмента станции, включающее два крана «Стрела», ранее стоявшие на «Пирсе», а затем перемещенные на модули «Поиск» и «Заря».
Именно ERA вскоре станет главным механизированным помощником космонавтов на внешней поверхности МКС. Ей предстоит устанавливать, снимать и заменять оборудование за бортом станции, в том числе выносить его из российского шлюза. В частности, именно с его помощью на модуль «Наука» установят шлюзовую камеру и теплообменник, которые уже находятся на МКС.
Манипулятор также сможет обследовать МКС с помощью видеокамер, сопровождать космонавтов в ходе внекорабельной деятельности.
ERA станет первым роботом, способным «гулять» по внешней стороне российского сегмента МКС, «шагая» между точками фиксации на модулях «Наука» и «Причал». Система управления дает возможность роботу самостоятельно «ходить», перемещаясь от одного узла крепления к другому.
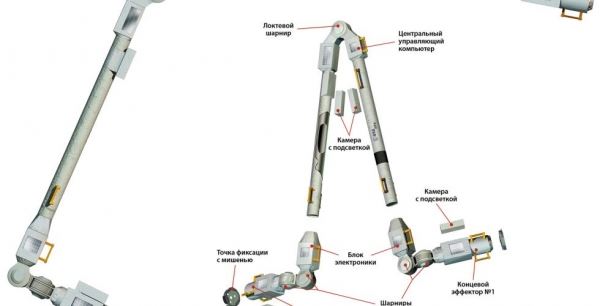
Манипулятор, имеющий в вытянутом состоянии длину 11,3 метра, состоит из двух симметричных длинных секций, соединенных шарниром, и двух «запястий». Правда, вместо кистей на концах находятся так называемые эффекторы EES (End Effectors) — элементы, которые «рука» использует для удержания станции, захвата груза и помощи космонавтам, в том числе для их перемещения между рабочими площадками.
«Суставы» обеспечивают манипулятору очень высокую подвижность; он может дотягиваться до объектов на расстоянии 9,7 метра и переносить восьмитонные грузы со скоростью до 10 см/сек и с точностью позиционирования до 5 мм. При этом масса самой руки составляет всего 630 кг.
Четыре камеры, осветительные блоки и электроника позволяют контролировать работу «руки», а управлять ею можно будет как изнутри, так и снаружи станции. Уже имеющиеся на МКС манипуляторы такими возможностями не располагают.
По словам директора по исследованиям человеко-машинных систем Европейского космического агентства Дэвида Паркера, ERA обеспечит экипажу больше свободы и гибкости в выполнении операций.
Кстати, европейская «рука» — единственный манипулятор на МКС, которым можно управлять вручную без применения джойстиков. Его действия строятся в автоматическом режиме — на основе команд, подаваемых космонавтами с пультов управления, которые расположены как внутри, так и снаружи станции. Теоретически в будущем команды смогут передавать не только космонавты, но и операторы с Земли. Пока этот вариант управления не реализован.
В конфигурации «Чарли Чаплин»
Разработка европейского космического манипулятора началась в 1985 г. Компания Fokker Space провела исследования в интересах программы мини-шаттла Hermes, над которой тогда работало Европейское космическое агентство. В итоге появился проект роботизированной руки для HERA (Hermes Robotic Arm) — масштабно уменьшенного аналога манипулятора Canadarm, использовавшегося на американских шаттлах для перемещения грузов в космосе.
После отмены программы Hermes в 1992 г. Европейское и Российское космические агентства согласовали возможность установки HERA для обслуживания разрабатываемой космической станции «Мир-2», а манипулятор получил свое сегодняшнее имя ERA. Именно тогда к «руке» добавили управляющий компьютер и два новых пульта управления — один для космонавта в открытом космосе, другой — для экипажа внутри станции.
С отменой проекта «Мир-2» и началом работ по МКС проект был адаптирован к российскому сегменту международной станции, о чем было подписано соответствующее соглашение. По мере изменения конфигурации сегмента манипулятор в чертежах «кочевал» с модуля на модуль. Полномасштабное проектирование началось в 1998 г. в привязке к российской научно-энергетической платформе (НЭП) — модулю, который на первоначальном этапе предполагалось изготовить для станции.
Первой миссией ERA была бы установка панелей солнечных батарей. Платформу планировалось запустить в 2001 г. на американском шаттле, затем старт перенесли на 2002 год. После гибели «Колумбии» (01.02.2003) его отложили на неопределенный срок, а затем проект НЭП вообще отменили.
В 2004 г. работы возобновились: решили установить ERA на модуль, который позже назвали «Наукой». С европейцами снова было заключено соответствующее соглашение. Начались испытания одной из моделей манипулятора в условиях, имитирующих невесомость. Прикрепленную к макету модуля «Наука» конструкцию погружали в воду в гидролаборатории ЦПК, где с ней тренировались космонавты.
Кроме вышеуказанной модели, при тестировании использовались еще две. Первая — для определения геометрического соответствия ERA посадочным местам при запуске, вторая — для вибропрочностных испытаний в стартовой конфигурации.
В 2005 г. ЕSA подписало контракт с Airbus Defense and Space в целях подготовки ERA к запуску с «Наукой» на ракете «Протон-М» в ноябре 2007 г. В феврале 2006 г. в Россию прибыло оборудование для обучения космонавтов работе с манипулятором. Тем временем запуск «Науки» неоднократно переносился, а вместе с ним откладывалась и поставка в Россию летного экземпляра ERA. К тому же разработка «руки» тоже шла не без технических и программных проблем. Только в мае 2020 г. ERA прибыла на Байконур, а год спустя манипулятор установили на «Науку».
Во время запуска в июле этого года ERA крепилась в зоне малого диаметра модуля в конфигурации, называемой «Чарли Чаплин»: плечевые сегменты параллельны и примыкают друг к другу, а оба концевых эффектора, напротив, разведены в стороны как концы ботинок великого комика. Подвижные сегменты «руки» были закреплены специальными крючками за посадочные места на поверхности «Науки». Космонавты освободят их, выйдя в открытый космос.
Многорукий Шива
ERA — далеко не единственный манипулятор на борту МКС. Станция оснащена еще несколькими роботизированными «руками», выполняющими аналогичные функции.
Первая, и самая известная, это передвижная обслуживающая система Canadarm2 американского сегмента. Она состоит из трех частей: передвижной базовой тележки, грузоподъемного манипулятора и двуручного захвата «Декстр» для деликатной работы на внешней поверхности. Система может перемещаться по рельсам на ферменных конструкциях с помощью тележки.
Сравнивать Canadarm2 и ERA довольно сложно, поскольку они заметно отличаются по задачам и возможностям, хотя и похожи внешне.
Так, Canadarm2 значительно крупнее (максимальная длина составляет 17.6 м), мощнее (способен манипулировать с объектами массой до 116 тонн, например с шаттлом) и тяжелее (собственная масса — 1170 кг). Этот манипулятор служит в том числе для «подхвата» и стыковки с МКС модулей и кораблей разных стран, не имеющих активной системы стыковки. В то же время обе «руки» могут самостоятельно «путешествовать» по поверхности станции от точки к точке, выполнять техническое обслуживание и инспекцию, перемещать грузы, а также помогать людям во время работы в открытом космосе.
Поскольку захваты Canadarm2 не совместимы с такелажными узлами на российском сегменте, его нельзя использовать на российских модулях, за исключением «Зари». Таким образом, из-за разницы интерфейсов Canadarm2 может работать только с американским сегментом, а ERA — только с российским.
В отличие от манипулятора ERA, имеющего полностью автоматический режим, Canadarm2 может работать под управлением либо астронавта на борту МКС, либо оператора наземной группы в штаб-квартире NASA.
На модуле «Кибо» установлен японский манипулятор JEM-RMS (Japanese Experiment Module, the Remote Manipulator System), использующий те же захваты, что и Canadarm2. Эта «рука» служит исключительно для работы на японском модуле: с ее помощью в основном загружались и разгружались платформы для экспонирования образцов и научных грузов, прибывавших на автоматическом «грузовике» HTV «Конотори».
Таким образом ERA гармонично дополнит семейство роботизированных манипуляторов МКС, повысив функционал российского сегмента. Первоочередные задачи «руки» на первый год работы на космической станции: монтаж большого радиатора и шлюзовой камеры на модуле «Наука», а также установка мобильного рабочего места.
В перспективе
Руководитель летно-космического центра Ракетно-космической корпорации «Энергия» Александр Калери сообщил, что для установки манипулятора ERA потребуются три выхода в открытый космос. В них будут участвовать европейские астронавты Маттиас Маурер и Саманта Кристофоретти. Они прилетят на МКС соответственно в октябре этого года и в апреле следующего.
В ходе российских выходов в январе 2022 г. космонавты снимут с робота термочехлы и элементы крепления. В дальнейшем манипулятор протестируют и задействуют в работе.
«ЕSA с большим нетерпением ждет начала работы с манипулятором ERA, — сообщил „Русскому космосу“ руководитель проекта ERA Филипп Шонеджанс. — Манипулятор не только станет полезным дополнением к используемой на МКС робототехнике. Выполнение операций с ERA также позволит нам расширить опыт в области робототехники в целом, что крайне важно для реализации нашей программы исследований космоса».